Пилотируемые полеты на Луну, стр. 9
Вычисление потерь
Приращение скорости, обеспечиваемое ракетной ступенью, может быть определено путем вычитания из характеристической скорости гравитационных, аэродинамических потерь и потерь на управление [3]
В табл. 1 представлены типичные значения потерь для ракеты-носителя Saturn V применительно к траектории полета на Луну.
Таблица 1

Несовпадение вектора тяга двигательной установки с вектором скорости полета ракеты приводит к потерям на управление. Эти потери уменьшают скорость полета ракеты-носителя Saturn V на 187,5 м/сек. Однако, если бы траектория была направлена против вектора гравитации, гравитационные потери были бы значительно больше 187,5 м/сек.
Программное изменение соотношения компонентов топлива
Во время активного участка полета второй ступени ракеты-носителя Saturn V производится 20%-ное ступенчатое изменение соотношения компонентов топлива, вызывающее соответственно уменьшение тяги и увеличение удельного импульса.
При одинаковых заправках топлива характеристическая скорость ступени одинакова для полетов с постоянным соотношением компонентов топлива и программным изменением этого соотношения. Таким образом, улучшение характеристик при программном изменении соотношения компонентов достигается путем уменьшения потерь скорости, а не вследствие увеличения характеристической скорости. В основном, программное изменение соотношения компонентов уменьшает потери благодаря тому, что при этом топливо более быстро расходуется на начальном участке траектории и затраты энергии на подъем топлива в поле тяготения уменьшаются.
Угол наклона траектории полета ракеты-носителя Saturn V на активном участке имеет вид экспоненциальной кривой (рис. 13.1).
Эффект ступенчатого изменения соотношения компонентов топлива при полете по такой траектории не поддается простому наглядному объяснению, однако можно сказать, что большая тяга желательна, когда движение ракеты близко к вертикальному, а большой удельный импульс желателен при движении ракеты, близком к горизонтальному. Рассмотрим пример, позволяющий показать, почему оптимальное значение удельного импульса сильно зависит от угла наклона траектории полета.
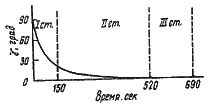
Рис. 13.1. Программа изменения угла наклона траектории полета ракеты-носителя Saturn V
Полет с постоянным углом наклона траектории
Рассматривая движение ракеты по траектории с постоянным углом наклона в постоянном гравитационном поле, предположим, что тяга, расход топлива и удельный импульс являются линейными ограниченными функциями соотношения компонентов топлива, причем тяга и расход топлива – возрастающие функции, а удельный импульс – убывающая функция.
Задача сводится к выбору такого соотношения компонентов топлива, при котором ракета в конце активного участка будет иметь максимальную скорость.
Если предположить, что потери на управление и преодоление силы аэродинамического сопротивления пренебрежимо малы, а удельный импульс постоянен, то скорость в конце активного участка полета ракеты может быть определена по формуле
Поскольку g0 и ? постоянные величины, уравнение можно проинтегрировать
Для второй ступени ракеты-носителя Saturn V можно установить, что меньший удельный импульс обеспечивает максимум конечной скорости в случае вертикального полета, так как большая тяга и меньшая продолжительность активного участка позволяют уменьшить гравитационные потери, но при горизонтальном полете член, характеризующий гравитационные потери, равен нулю, независимо от времени работы двигателей, и в этом случае желателен более высокий удельный импульс. Таким образом для какого-то промежуточного значения угла ? между 0 и 90° скорость в конце активного участка не зависит от величины удельного имлульса. Это значение можно определить по формуле граничные значения линейных функций удельного импульса и секундного расхода.
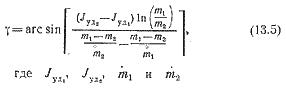
Для второй ступени ракеты-носителя Saturn V по уравнению (13;5) получим ?=3; таким образом, если угол наклона траектории меньше 3°, то желательно иметь большой удельный импульс при меньшей тяге, а если ?>3° снижение удельного импульса при увеличении тяги позволяет увеличить полезную нагрузку.
Связи между приращениями скорости и полезной нагрузки
В конечном итоге необходимо обеспечить максимум веса полезной нагрузки, а не скорости в конце активного участка траектории полета.
Для последней ступени ракеты в момент выключения двигательной установки имеем
Подставляя m1= m2+?m1, разлагая полученное выражение в ряд Тейлора и решая относительно ?m1 получим
Для ракеты-носителя Saturn V приращение характеристической скорости на 1 м/сек экивалентно увеличению веса полезной нагрузки, выводимой на траекторию полета к Луне, на 15 кг.
Полет с переменным углом наклона траектории
В практических случаях угол наклона траектории полета ракеты меняется со временем, и оптимальная величина удельного импульса не является постоянной для всего полета. Меньший удельный импульс при большей тяге выгоден на участке траектории, близком к вертикальному, затем при переходе к более пологому участку траектории целесообразно изменить соотношение компонентов топлива таким образом, чтобы обеспечить высокий удельный импульс. Однако требование достижения определенной высоты в конце активного участка усложняет анализ реального полета.
В реальном полете управление ракетой, близкое к оптимальному, обеспечивает достижение заданной высоты в конце активного участка.
Изменение расхода топлива в процессе полета в предположении постоянства удельного импульса и фиксированного времени работы двигательной установки не приводит к изменению характеристической скорости. Однако, если энерговооруженность выше и расход топлива больше на начальном этапе полета, то ракета будет двигаться с большим ускорением и, следовательно, высота полета в конце активного участка будет больше.
Таким образом, если топливо выгорает быстрее при большей тяге на начальном этапе полета, то это приводит к увеличению высоты в конце активного участка. Но высота, большая по сравнению с расчетной, нежелательна, поэтому вектор скорости будет раньше приведен в горизонтальное положение. В результате соответственно снижаются потери на преодоление гравитационных сил и на управление.
3
Иногда в это уравнение включаются потери, связанные с кориолисовым ускорением, нерасчетным истечением газа из сопла ЖРД и гарантийным запасом топлива.