Пилотируемые полеты на Луну, стр. 26
Законы управления ЖРД реактивной системы управления
Быстрейшая скорость повторения расчетов для ЦАП, возможная в пределах расчетной нагрузки бортовой ЭЦВМ лунного корабля, составляет 10 цикл/сек. Однако для легкой взлетной ступени 2 ЖРД РСУ могут создать угловое ускорение 50 град/сек?.
Простейшим законом управления мог бы быть циклический закон, ЖРД РСУ включено – выключено. Но в этом случае точность управления угловой скоростью взлетной ступени была бы только 5 град/сек.
Для осуществления управления с необходимой точностью с помощью фактора эффективности управления точно определяется продолжительность включения ЖРД РСУ, потребная для необходимого изменения угловой скорости.
Порядок расчета времени работы ЖРД РСУ для случая автоматического управления одним лунным кораблем, запрограммирован для одной оси как функция:
1) ошибки ориентации ?е и ошибки угловой скорости ?е
2) параметров, рассчитываемых в цепи настройки, которые определяют кривизну и положение парабол фазовой плоскости;
3) оценки выгоды получения с одного или двух ЖРД требуемого импульса момента.
Обращаясь к этой программе и вводя на входе соответствующую информацию, определяют время работы ЖРД РСУ для каждой из осей.
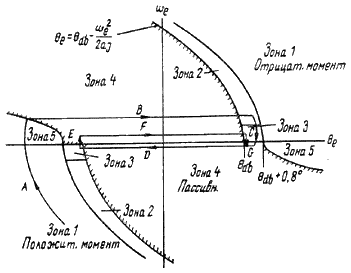
Рис. 24.5. Закон управления ЖРД реактивной системы лунного корабля на пассивных участках траектории полета
Логика управления в пассивном полете иллюстрируется диаграммой в фазовой плоскости рис. 24.5. Фазовая плоскость выше оси ?е делится на 5 зон, ограниченных параболами.
В логике управления в фазовой плоскости ?е – ?е используется также угловое ускорение, складывающееся из углового ускорения от ЖРД РСУ и возмущающего углового ускорения. Крутизна парабол, ограничивающих зону 2 на фазовой плоскости, соответствует условию, когда на траектории работают ЖРД РСУ. Значения ускорений от ЖРД РСУ, которые определяют эту параболу, подсчитываются в контуре настройки. Парабола, разделяющая зоны 4 и 5, не траекторная. Это пологая кривая, поддерживающая управление с малой угловой скоростью, однако не настолько, чтобы существовали большие ?е.
Форма кривой сохранена параболической, чтобы логика границ была общей и удобной для компактности кодирования. Выбранная пологость соответствует угловому ускорению 1,4 град/сек?.
Пересечение парабол с осью ?е является функцией зоны
нечувствительности ?db, выбираемой астронавтом или программой, выполняющей автоматический маневр. Допустимые ошибки ориентации области зоны нечувствительности могут быть 0,3, 1 и 5°.
Фазовая плоскость сконструирована таким образом, что управляющее действие из любых начальных условии с помощью двух главных импульсов приводит к заданной ориентации. На рис. 24.8 это показано сегментом AВС.
После перехода в зону нечувствительности состояние аппарата определяется минимальным предельным импульсным циклом DEFG с единичным зажиганием одного ЖРД РСУ каждый раз при пересечении зоны 3.
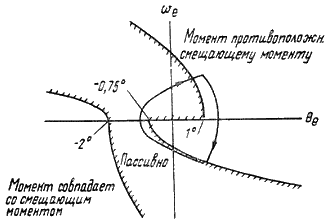
Рис. 24.6. Закон управления ЖРД реактивной системы лунного корабля на активных участках траектории полета
На активных участках траектории полета используется логика управления, показанная на рис. 24.6. Точки пересечения парабол с осью ?e передвигаются в. зависимости от величины расчетного смещающего углового ускорения. Точки пересечения (1°, -2°, 0,75°), показанные на рисунке, типичны для активного участка взлета, когда вектор тяги ЖРД взлетной ступени смещен. Крутизна четырех парабол устанавливается по четырем разностям угловых ускорений. Верхняя левая парабола определяется минимальным ускорением ?min=1,4 град/сек?, как и в случае пассивного полета. Верхняя правая парабола определяется располагаемой разностью ускорений между ускорением от смещающего момента и противоположным по знаку ускорением от ЖРД РСУ.
Нижняя правая парабола определяется только смещающим угловым ускорением (ЖРД РСУ не работают).
Фазовая плоскость спроектирована так, что аппарат управляется низкочастотным предельным циклом, в котором один раз за цикл дается команда на зажигание ЖРД РСУ и отрабатывается единичный управляющий импульс, противоположный по знаку смещающему моменту.
Хотя ЦАП должен выполнять одни и те же функции управления аппаратом, когда лунный корабль состыкован с основным блоком и если он летит один, однако для состыкованной компоновки режим ЦАП разрабатывался отдельно.
Особенность проблемы заключалась в том, что в состыкованном виде корабль Apollo имеет 3 формы низкочастотных изгибных колебаний и слабый по прочности переходник, стыкующий основной блок и лунный корабль. Поэтому была разработана специальная логика торможения, исключающая, возможность зажигания ЖРД РСУ с частотой собственных изгибных колебаний корабля Apollo.
Кроме законов автоматического управления ориентацией аппарата с помощью ЖРД РСУ были разработаны специальные законы, обеспечивающие ручное управление. По законам ручного управления в зависимости от отклонения рукояток управления ориентацией вырабатываются сигналы на вход. в ЦАП.
При доводке характеристик ЦАП с использованием ортогональных осей координат Р, U, V применительно к законам управления ЖРД РСУ в фазовой плоскости относительно каждой отдельной оси было обнаружено перекрестное влияние каналов управления.
Распределение массы лунного корабля таково, что главные оси моментов инерции проходят вблизи осей Q и R, а не U и V. В результате, момент от ЖРД оси V порождает угловое ускорение не только относительно оси V, но и относительно оси U. Величина одновременно возникающего перекрестного ускорения такова, что в худшем случае вектор углового ускорения отклоняется на 15° от действующего вектора момента.
Чтобы устранить перекрестное влияние каналов управления ЖРД РСУ, была введена неортогональная система осей координат U' и V' (рис. 24.7).
Направление осей U' и V' определялось единственным требованием, чтобы направление U' было ортогонально угловому ускорению, возникающему от вектора момента оси V или вектора момента оси Р, направление V было ортогонально угловому ускорению, возникающему от вектора момента оси U или момента оси Р. Управления, определяющие угол ? имеют вид

Находя вектор ошибки ориентации и вектор ошибки угловой скорости на осях U' и V' и используя компоненты U' и V' для определения требуемых векторов моментов ЖРД РСУ по осям U и V, исключается перекрестное влияние каналов управления.
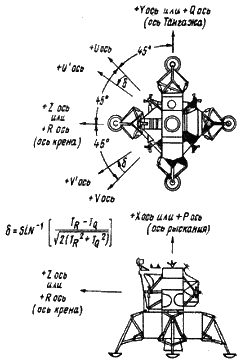
Рис. 24.7. Система неортогональных осей координат лунного корабля
Закон управления направлением вектора тяги
При проектировании управления карданом ЖРД для изменения направления вектора тяги посадочной ступени лунного корабля предусматривалось использование этого управления для совмещения вектора тяги с центром масс аппарата и уменьшения таким образом расхода топлива на ЖРД РСУ. Так как управление ориентацией должно обеспечиваться ЖРД РСУ, при проектировании не требовалось задавать большую угловую скорость изменения направления вектора тяги, и был выбран маломощный и легкий привод кардана, обеспечивающий изменение угла отклонения ЖРД со скоростью 0,2 град/сек. Привод связан с ЦАП простым принципом включено-выключено. Для обеих осей Q и R, вокруг которых можно поворачивать вектор тяги, ЦАП может давать команды на угловую скорость 0,2 град/сек; -0,2 град/сек или ноль.
Однако минимизация расхода топлива на ЖРД РСУ была основной проблемой, и так как в процессе торможения и посадки ЖРД посадочной ступени работает все время, искали закон управления ориентацией с использованием посадочного ЖРД и без включения ЖРД РСУ по каналам U и V. Выбранному закону соответствует минимальное время управления.