Занимательная анатомия роботов, стр. 4
Внутри «Мэрилин Монро» действует 80 электромагнитов. «Именно столько мускулов занято в движениях живого человеческого тела и лица, которые кукла имитирует», – поясняет С. Мицуно.
Разумеется, до человеческого подобия этим игрушкам ещё далеко, однако программируемость на ту или иную «манеру поведения» позволяет вполне оправданно относить их к роботам первого поколения.
Совсем другое дело – кибер, разработанный группой исследователей одной из токийских лабораторий робототехники. Это человекоподобный робот с руками, ногами, зрительным, слуховым и речевым аппаратом, и обладающий интеллектуальными способностями на уровне двух – трёхлетнего ребёнка. Он может, в частности, выполнить просьбу отыскать что – либо в помещении и принести, а также отвечать на вопросы.
Роботы – объекты повышенной опасности
Робот – помощник человека, но слепо доверяться ему нельзя (рис. 8). Те промышленные роботы, которые сейчас трудятся на заводах и фабриках, пока ещё недостаточно сообразительны. Представим, что на линии сборки автомобилей случается какой – нибудь «перекос». Автоматы этой ошибки не замечают. Их настроили на то, чтобы сверлить отверстия в дверце, а они сверлят теперь в баке для горючего. Неправильная установка изделия их не волнует. Кроме того, иногда в их электронном блоке происходит какой – нибудь сбой, и тогда автомат в «слепой ярости» начинает колотить своей мощной стальной лапой по чему попало (так случилось недавно в Японии, когда роботом был убит рабочий).
Робот, скажем, как и автомобиль или самолёт, является объектом повышенной опасности. Поэтому для большей гарантии безопасности человека, взаимодействующего с роботом, желательно, чтобы в программу поведения робота была заложена определённая осмотрительность, забота о безопасности человека.
Говоря о взаимодействии человека и робота, уместно вспомнить о трёх законах системы «человек – робот», сформулированных американским писателем – фантастом и учёным А. Азимовым:
1. Робот не должен своим действием или бездействием причинять вред человеку.
2. Робот должен повиноваться командам, которые ему даёт человек, кроме тех случаев, когда эти команды противоречат первому закону.
3. Робот должен заботиться о своей безопасности, поскольку это не противоречит первому и второму законам.

Эти законы, по мысли Азимова, должны полностью гарантировать безопасность четовека в системе «человек – робот». Создать роботов, для которых эти законы были бы непреложны, наша задача.
Роботы для Мегамира
Казалось бы, куда уж дальше, но есть совершенно безграничная область для фантазии роботостроителей – мегамир. В наше время, когда человечество планомерно осваивает ближайшую соседку Земли – Луну, фантасты устремились к звёздам. В одной нашей Галактике больше сотни миллиардов солнц, не исключено, что у многих есть планеты. Из всех космических грёз самая распространённая и самая заманчивая – мечта о встрече с братьями по разуму, с иными цивилизациями, желательно, с более развитыми, способными передать нам секреты ещё не сделанных открытий. Однако даже в Солнечной системе нет планеты, где человек остался бы в живых, сняв скафандр.
Исследования мегамира связаны со сверхдальними космическими полётами. Для таких полётов потребуется время, превышающее длительность человеческой жизни. Спрашивается: есть у человека способ исследовать мегамир? Да, имеется. Это создание кибернетической системы – робота, управляемого искусственным интеллектом и рассчитанного на длительное функционирование в мегамире. Такой робот может достичь самых дальних районов Вселенной.
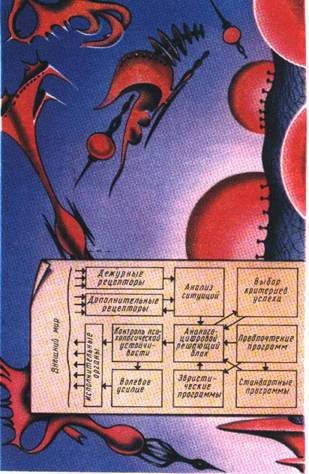
Неизвестность сред, в которых придётся функционировать системе, непредвиденность и сложность конкретных задач, которые придётся ей решать, исключают возможность построения системы управления робота с заданным алгоритмом, сколь бы широкий круг задач в нём не был предусмотрен. Управлять системой можно будет, только моделируя творческое мышление человека. Система должна быть саморазвивающейся, причём это касается и саморазвития искусственного интеллекта (рис. 9). Искусственный интеллект должен уметь решать такие частные, но важные проблемы, как формирование языка, распознавание образов, построение гипотез, выбор критериев успеха, самообучение.
Подобно человеку, автономная система робота – астронавта с искусственным интеллектом не сможет моделировать реальный мир, если не пройдёт обучения такому моделированию в известных человечеству средах и если переход от известных сред к неизвестным не будет для этой системы постепенным.
Проблема создания автономно функционирующего робота – астронавта, управляемого искусственным интеллектом и предназначенного для сбора полезной человечеству информации в мегамире, сегодня стоит на рубеже научных исследований дальнего поиска.
Что же нам делать?
Роботизация. Роботы и робото-технические системы. Это все очень серьёзно. Именно поэтому мы начали книгу со всестороннего обзора основных проблем роботизации.
В последующих разделах мы перейдём к вопросам моделирования различных систем роботов, будем думать, как изготовить ту или иную систему или даже целого робота.
Каждый может внести свой вклад в эту важнейшую государственную проблему. Вы сами видите, как велико здесь поле деятельности и как интересна любая задача.
На занятиях кружка радиоэлектроники автор этой книги задал ребятам вопрос: если бы мы с вами занялись конструированием человекоподобного робота, то какими электронными системами вы бы его оснастили? И вот пятеро мальчиков ответили, что кроме общепринятых систем зрения, слуха, осязания они бы оснастили робота следующими устройствами:
1. Аварийной системой, останавливающей все механизмы робота при появлении тревожного возгласа «Аи»! или «Ой»!
2. Системой «веди меня» – если робота взять за руку и потянуть, он пойдёт за вами.
3. Системой различения команд, подаваемых голосом: «Иди», «Стой», «Здравствуй», реагирующей на звучание букв «и», «о», «а», отличающихся своими частотами.
4. Системой поворачивания головы робота на появившийся звуковой сигнал.
5. Системой «кивок» – робот доброжелательно кивает, когда с ним кончают говорить.
6. Системой движения губ робота и изменения свечения ламп во рту робота в такт с его речью.
7. Инфракрасными локаторами, предохраняющими робота от столкновения с препятствием.
8. Системой, обеспечивающей физкультурную зарядку робота – цикл различных движений по определённой программе.
9. Системой «настроение робота», изменяющей активность его движений, издающей «смех», когда он доволен, и «унылое ворчание» – когда недоволен.
10. Игрой в «крестики и нолики» на груди – экране робота.
11. Системой танца робота от низкочастотного ритма или различного сочетания музыкальных тонов.
12. Кроме игры в «крестики и нолики» на груди робота можно установить бегущие огни, загорающиеся в такт с музыкой.
Ребята тут же набросали структурные схемы предлагаемых ими систем робота и даже позаботились о микроэлектронном выполнении всех предлагаемых устройств. Они, конечно, фантазёры, эти ребята, но если задуматься, то среди их предложений – экспромтов есть кое – что любопытное и, возможно, полезное и для самых настоящих промышленных роботов.
Разве не заслуживает внимания «аварийная система», останавливающая робота при возгласах «Ой» и «Аи». Ведь современный робот – манипулятор – это далеко не безопасный объект. А физзарядка робота по определённой программе – в ней тоже есть рациональное зерно. Такую зарядку есть смысл проделывать и настоящим роботам в порядке контроля жизнедеятельности и чёткости работы всех его систем перед тем, как приступить к настоящей работе. Это как бы встроенная система контроля роботоспособности всех систем робота.