Большая Советская Энциклопедия (УП), стр. 13
Перспективным направлением развития АСУ является создание Общегосударственной автоматизированной системы управления (ОГАС), предусматривающей взаимную связь управления всеми административными, промышлеными и др. объектами страны с целью обеспечения оптимальных пропорций развития народного хозяйства СССР, выработки напряжённых сбалансированных плановых заданий и их безусловного выполнения. Технической базой ОГАС станет Единая государственная сеть вычислительных центров , осуществляющая информационную и функциональную координацию работы центров страны.
Лит.: Глушков В. М., Введение в АСУ, 2 изд., К., 1974; Жимерин Д. Г., Мясников В. А., Автоматизированные и автоматические системы управления, М., 1975.
И. А. Данильченко.
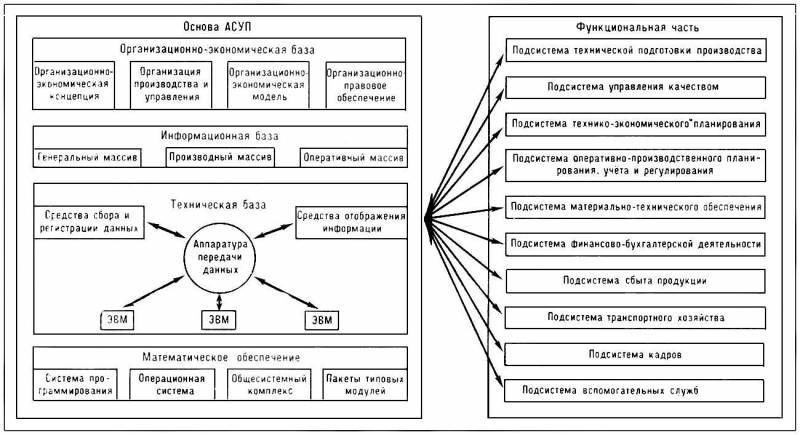
Структурная схема автоматизированной системы управления предприятием АСУП.
Управления народным хозяйством институт
Управле'ния наро'дным хозя'йством институ'т (ИУНХ), высшее учебное научно-методическое учреждение по повышению квалификации руководящих работников народного хозяйства в области современных методов управления, организации производства и планирования. Учреждено при Государственном комитете Совета Министров СССР по науке и технике (1970). Слушатели ИУНХ – лица с высшим образованием из числа руководителей государственных комитетов, общесоюзных, союзно-республиканских министерств и ведомств, крупных производственных объединений и предприятий. В институте обучаются также слушатели из социалистических стран. Срок обучения (с отрывом от производства) 3 мес. В составе института (1975): научно-методический отдел, 4 кафедры (социально-экономических наук; экономико-математических методов планирования, управления и прогнозирования; автоматизированных систем управления; социологических и психологических аспектов управления), проблемная научно-исследовательская лаборатория экономико-математических методов и исследования операций, учебно-вычислительный центральный институт осуществляет методическое руководство и координацию деятельности системы институтов повышения квалификации руководящих работников народного хозяйства в области научных методов управления, подготавливает и издаёт учебную и методическую литературу. В 1972–75 коллективом преподавателей института подготовлена серия из 8 книг «Наука и управление», где освещены актуальные проблемы теории и практики управления.
В. Г. Шорин.
Управления система с переменной структурой
Управле'ния систе'ма с переме'нной структу'рой (СПС), нелинейная система автоматического управления, состоящая из совокупности непрерывных подсистем (называемых структурами) с определённым правилом перехода в процессе функционирования от одной структуры данной совокупности к другой. В СПС устройство управления содержит ключевые элементы, которые разрывают или восстанавливают связи между функциональными элементами системы, изменяя тем самым каналы передачи воздействий и обеспечивая переход от одной структуры системы к другой (рис. 1 ). Такой принцип построения устройства управления существенно расширяет возможности управления вследствие использования полезных свойств каждой из структур и, кроме того, позволяет получить новые свойства, не присущие ни одной из них.
Особенности СПС можно пояснить на примере простейшей системы автоматического управления (САУ), поведение (движение) которой описывается дифференциальным уравнением
где х – управляемая величина, u – управляющее воздействие, t – время. Пусть в САУ (1) возможна реализация лишь положительной (u = bx , b = const > 0) и отрицательной (u = – aх, a = const > 0) обратной связи (a и b – коэффициент передачи цепи обратной связи). При положительной обратной связи движение САУ описывается уравнением
Задача состоит в том, что требуется выбрать такое управление и из класса возможных управлений, при котором система обладает асимптотической устойчивостью. Из анализа фазовых портретов системы следует, что ни положительная, ни отрицательная обратная связь порознь не решает поставленной задачи. Поэтому в соответствии с методами СПС реализуют следующее правило изменения структур:
(2)
Фазовый портрет такой системы изображен на рис. 2 , б; из анализа портрета следует, что изображающая точка из произвольного начального положения попадает на прямую s = 0, проходящую через начало координат, в окрестности которой фазовые траектории направлены навстречу друг другу и, следовательно, изображающая точка не может покинуть эту прямую. Траектория s = 0 не принадлежит ни одной из структур (I или II), поэтому, согласно (2), за счёт переключения управления и в системе происходит смена структур теоретически с бесконечной частотой. Такой режим движения называется скользящим, а за уравнение движения принимается уравнение прямой s = 0:
Все решения уравнения (3) стремятся к нулю при t ® ?, т. е. поставленная задача решена. Существенно, что движение системы в скользящем режиме не зависит от характеристик объекта управления и коэффициент обратной связи, качество переходного процесса определяется только выбором параметра с.
Рассмотренный пример показывает, что посредством сочетания неприемлемых порознь структур и за счёт использования скользящих режимов можно синтезировать СПС, обладающие рядом положительных свойств, в частности апериодической устойчивостью и параметрической инвариантностью . С помощью СПС решается широкий круг задач теории управления, например задачи высококачественного воспроизведения задающего воздействия при инвариантности к параметрическим и внешним возмущениям, многосвязного регулирования, оптимизации и др.
Лит.: Емельянов С. В., Системы автоматического управления с переменной структурой, М., 1967; Системы с переменной структурой и их применение в задачах автоматизации полёта, М., 1968; Теория систем с переменной структурой, М., 1970; Уткин В. И., Скользящие режимы и их применения в системах с переменной структурой, М., 1974.
Б. З. Голембо, С. К. Коровин.
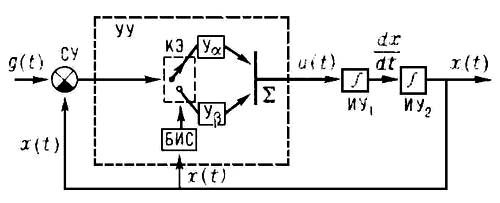
Рис. 1. Функциональная схема системы управления с переменной структурой: УУ — устройство управления; СУ — сравнивающее устройство; КЭ — ключевой элемент; БИС — блок изменения структуры; ? — сумматор; Уa — усилитель с коэффициентом передачи a; Уb — усилитель с коэффициентом передачи b; ИУ — интегрирующие устройства; g(t) — задающее воздействие; u(t) — управляющее воздействие; x(t) — управляемая величина.